-
- Prepare GPSRDATA
-
- Make "original" Dataset
./create_original_dataset.shoriginal_datasettest.csvdev.csvtrain.csv
-
- Make "edited" Dataset (Ineject Noise)
learning_datasettrain/rho=<noise_level>_edited_phoneme.intrain/original_sentence.intrain/phoneme.intrain/label.outdev/rho=<noise_level>_edited_phoneme.indev/original_sentence.indev/phoneme.indev/label.out
-
- Prepare Utterance Data
-
- Speech Recognition
./SpeechRecognition.sh
-
- Learning
python -m nmt.nmt --src=in --tgt=out\
--vocab_prefix=/path/to/Dataset/Vocab\
--train_prefix=/path/to/Dataset/traindata\
--dev_prefix=/path/to/Dataset/devdata\
--test_prefix=/path/to/Dataset/testdata\
--out_dir=/path/to/Noisy_model\
--num_train_steps=12000 --steps_per_stats=100 --num_layers=1 --num_units=128 --dropout=0.2 --metrics=bleu\
--attention_architecture=standard --attention=luong`
-
- Inference
- 隠れ層 : 1層,128次元
- ドロップアウト確率 : 0.2
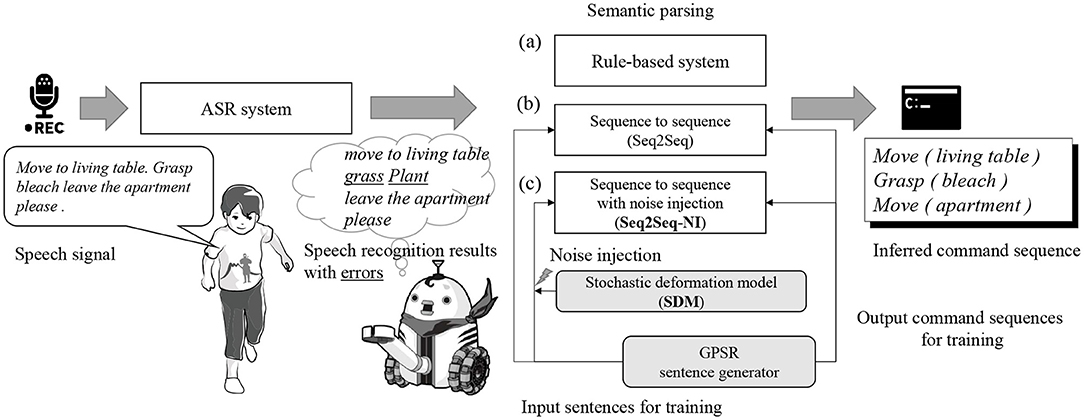
- Yuuki Tada, Yoshinobu Hagiwara, Hiroki Tanaka and Tadahiro Taniguchi. Robust Understanding of Robot-Directed Speech Commands Using Sequence to Sequence With Noise Injection, 2020.
- Yuki Tada (ex-student of Ritsumeikan University)
- Hiroki Tanaka (assistant researcher of Ritsumeikan University)