Install ROS
from http://wiki.ros.org/noetic/Installation/Ubuntu
Install Dependencies
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo bash ./install_geographiclib_datasets.sh
sudo apt install python3-pip
pip3 install --user future
pip3 install empy toml numpy packaging jinja2
pip3 install kconfiglib
pip3 install --user jsonschema
pip3 install munkres
pip3 install --user pyros-genmsg
sudo apt install python3-lxml libxml2-utils
sudo apt install python3-tk
sudo apt install libgstreamer1.0-0 gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly
sudo apt install gstreamer1.0-libav gstreamer1.0-doc gstreamer1.0-tools gstreamer1.0-x gstreamer1.0-alsa gstreamer1.0-gl gstreamer1.0-gtk3 gstreamer1.0-qt5 gstreamer1.0-pulseaudio
sudo apt-get install libgeographic-dev
sudo apt-get install geographiclib-tools
sudo apt-get install libgstreamer-plugins-base1.0-dev
Install PX4-Autopilot
git clone --branch release/1.12 https://github.com/PX4/PX4-Autopilot.git --single-branch
cd PX4-Autopilot
mkdir build && cd build
cmake ..
make
cd ~
echo "source PX4-Autopilot/Tools/setup_gazebo.bash $(pwd)/PX4-Autopilot $(pwd)/PX4-Autopilot/build/px4_sitl_default" >> ~/.bashrc
echo "export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/PX4-Autopilot" >> .bashrc
echo "export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/PX4-Autopilot/Tools/sitl_gazebo" >> ~/.bashrc
source ~/.bashrc
Install Swarm-lib (Our Package)
mkdir -p Swarm/src && cd Swarm/src
git clone --branch gazebo https://github.com/METUrone/Swarm-lib.git --single-branch
cd ~/Swarm
catkin_make
Launch the Simulation
source devel/setup.bash
roslaunch swarm gazebo.launchThis package consists of two main parts artificial_potential_field.py and iris_controller.py. artificial_potential_field nodes subscribes to current poses of uav{uav_id}/mavros/local_position/pose topic whose publisher is mavros, and publishes the instant velocity for each agent via {uav_id}/vel_commander topic. Then iris_controller node takes these velocity commands, send them to PX4 controller via /uav0/mavros/setpoint_velocity/cmd_vel_unstamped topic and publishes resulting poses to {uad_id}/position topic whose subscriber is artificial_potential_field node. This cycle continues until all tasks are achieved.
The following graph is a description of such a system with two agents. For the systems with more agents, description consists of the repetition of this structure.
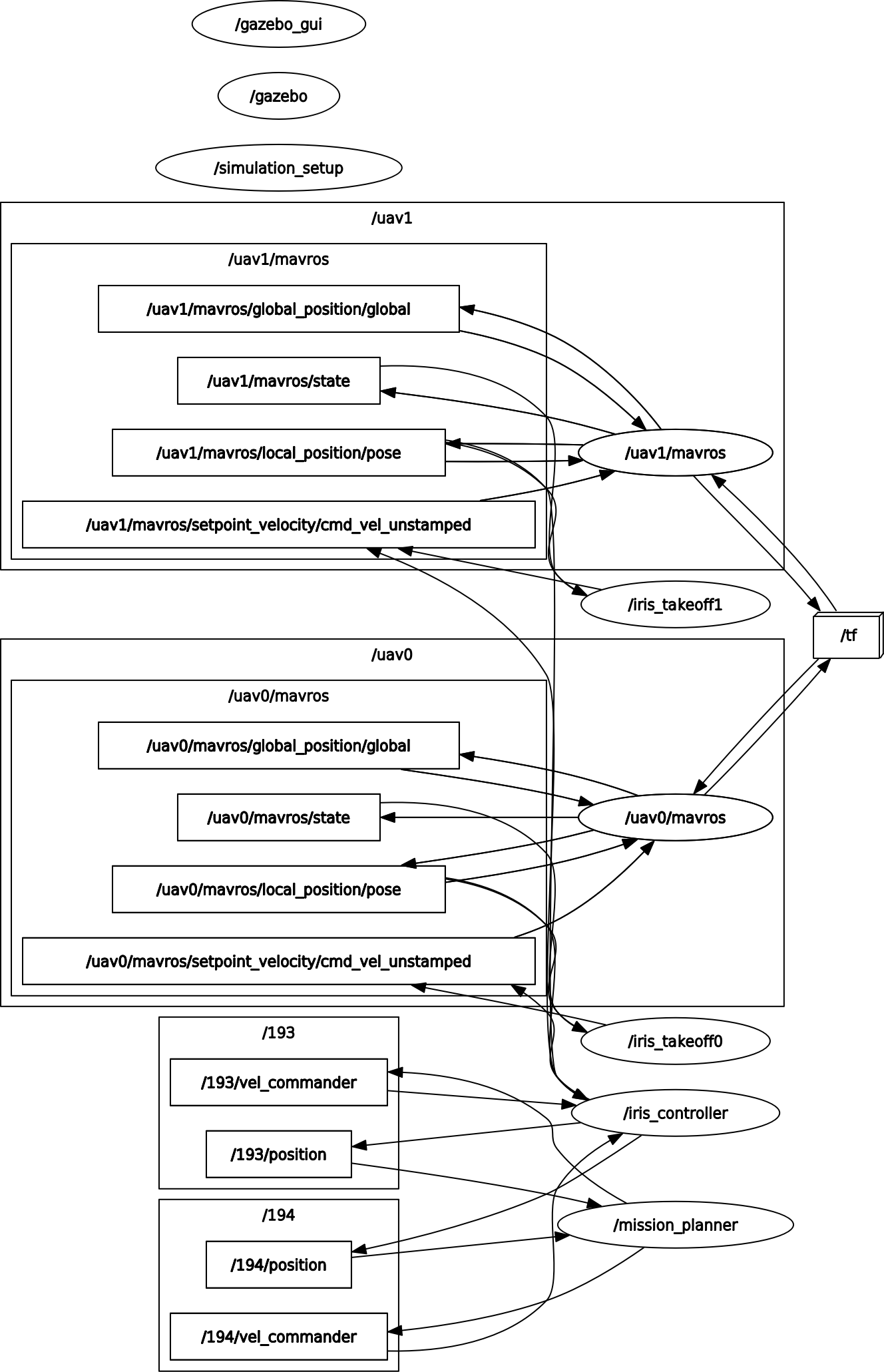
Iris_takeoff nodes are responsible for keeping drones in flight, and the mission_planner node is an interface where we specify the tasks we want to achieve (A GUI will be placed soon). Since crazyflie ids start from 193, here /uavx/ corresponds to the image of the crazyflie with id x in the simulation.
Here is an example run of a simulation where agents are performing forming formation and obstacle avoidance tasks.
https://drive.google.com/file/d/1jfvP-AinxXbAPjuOdyk524cK3rmOSeiJ/view?usp=sharing