![]()
Gazebo上でRaspberry Pi Mouseの動作をシミュレーションするためのROS 2パッケージです。
- OS
- Ubuntu Desktop 24.04
- ROS 2
- ROS 2 Jazzy Jalisco
- Gazebo
- Gazebo Sim 8.x
sudo apt install ros-jazzy-raspimouse-sim# Create workspace directory
mkdir -p ~/ros2_ws/src && cd ~/ros2_ws/src
# Clone package
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_sim.git
# Install dependencies
rosdep install -r -y -i --from-paths .
# Build & Install
cd ~/ros2_ws
colcon build --symlink-install
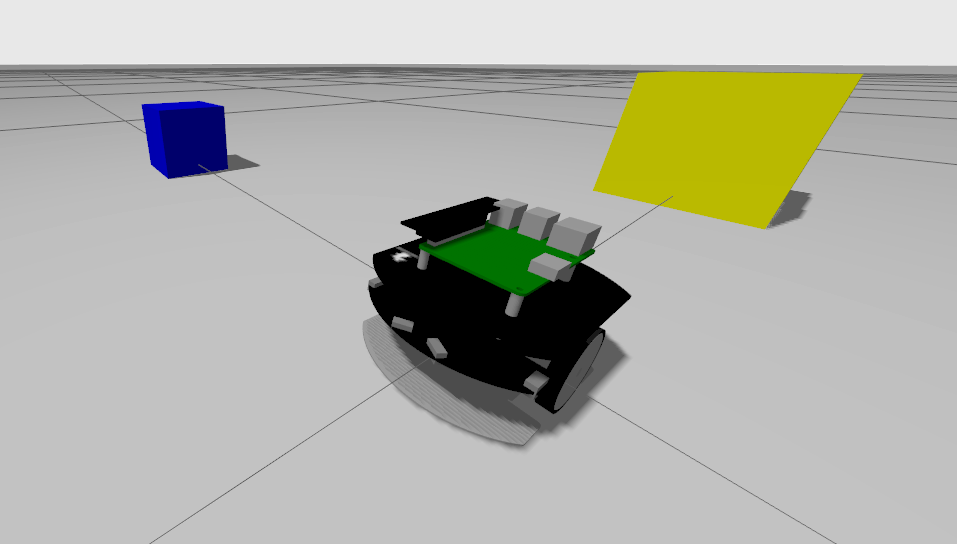
source ~/ros2_ws/install/setup.bash次のコマンドを実行し、Gazeboシミュレータを起動してRaspberry Pi Mouseのモデルを表示します。
ros2 launch raspimouse_gazebo raspimouse_with_emptyworld.launch.py- raspimouse_sim
- 本リポジトリに含まれる複数のパッケージに関するメタ情報を管理します。
- raspimouse_fake
- Raspberry Pi Mouseのモータ制御インターフェースを模擬するパッケージです。
- raspimouse_gazebo
- Gazebo上でシミュレーション環境を構築するためのモデルやスクリプトを提供するパッケージです。
サンプルプログラムの詳細な動作方法は、raspimouse_gazeboパッケージのREADMEで説明しています。
- Examples
- Joystick Control
- Object Tracking
- Camera Line Follower
- SLAM & Navigation
(C) 2016 RT Corporation <support@rt-net.jp>
各ファイルはライセンスがファイル中に明記されている場合、そのライセンスに従います。特に明記されていない場合は、MIT Licenseに基づき公開されています。 ライセンスの全文はLICENSEまたはhttps://www.apache.org/licenses/LICENSE-2.0から確認できます。
- 本ソフトウェアはオープンソースですが、開発はオープンではありません。
- 本ソフトウェアは基本的にオープンソースソフトウェアとして「AS IS」(現状有姿のまま)で提供しています。
- 本ソフトウェアに関する無償サポートは行っていません。
- バグの修正や誤字脱字の修正に関するリクエストは常に受け付けていますが、 それ以外の機能追加等のリクエストについては社内のガイドラインを優先します。 詳しくはコントリビューションガイドラインに従ってください。
本リポジトリは、以下のリポジトリのファイルをベースに開発されています。
- CIR-KIT/fourth_robot_pkg
- author
- RyodoTanaka
- maintainer
- RyodoTanaka
- BSD (BSD 3-Clause License)
- 詳細は package.xml を参照してください。
- author
- yujinrobot/kobuki
- authors
- Daniel Stonier
- Younghun Ju
- Jorge Santos Simon
- Marcus Liebhardt
- maintainer
- Daniel Stonier
- BSD (BSD 3-Clause License)
- 詳細は package.xml を参照してください。
- authors